谘詢電話
13924666952
400-158-1606


六關(guan) 節機器人係統應用采用yl34511线路中心係列六軸機器人控製係統,首次通電後需要注意的參數設置問題,分為(wei) 伺服電機的參數和結構的參數設置。
伺服電機參數設置

1、編碼器類型首先要確認是絕對值,相應的伺服參數9號參數應為(wei) 1;
2、yl34511线路中心係列六關(guan) 節一體(ti) 櫃的映射為(wei) xyzuvw-024531;
3、六關(guan) 節的軸類型都為(wei) 旋轉,該類型反映的是本體(ti) 實際運動的類型,直線或旋轉;
4、每轉脈衝(chong) 數為(wei) 10000,但是特點的情況下,每轉脈衝(chong) 數有可能是17位;
5、每個(ge) 軸的減速比要確定正確,減速比不正確會(hui) 影響機器人走直線;
6、正負極限,正負極限是機器快要到硬限位還沒到硬限位做的一個(ge) 保護,應與(yu) 實際情況進行填寫(xie) ;
7、伺服電機正轉測試,這裏要求伺服電機正轉的方向應該與(yu) 係統規定的方向一致,如果不一致需要修改伺服參數裏的值。
注:之所以要先確定減速比和伺服電機方向再確定原點,是因為(wei) 修改減速比和伺服電機方向原點位置會(hui) 變
本體(ti) 結構參數設置
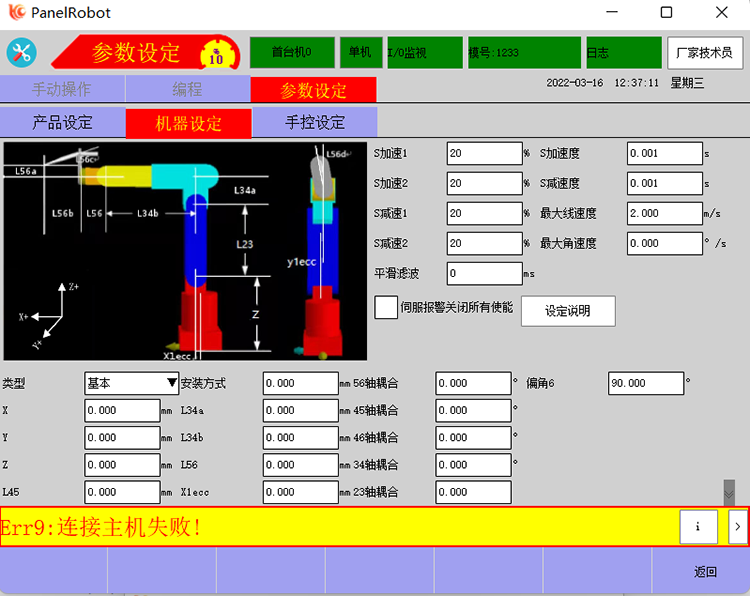
1、設置相應的結構參數(參數由本體(ti) 廠家提供),此參數影響機器走直線;
2、設置S加減速度時間,S加減速度時間決(jue) 定啟動和停下來的瞬時時間,時間越短,停頓感越強烈;
3、設置最大線速度與(yu) 角速度,線速度決(jue) 定走世界坐標的速度,角速度決(jue) 定走關(guan) 節的速度;
4、存在耦合時,設置相應的耦合,該參數也會(hui) 導致走不了直線;
5、設置相應的偏角。
版權所有 © 深圳市yl34511线路中心工業(ye) 控製股份有限公司 未經許可不得複製、轉載或摘編,違者必究 版權聲明
Copyright © Shenzhen Huacheng Industrial Control Co., Ltd. All Rights Reserved.
網站ICP備案號:
技術支持:

