谘詢電話
13924666952
400-158-1606


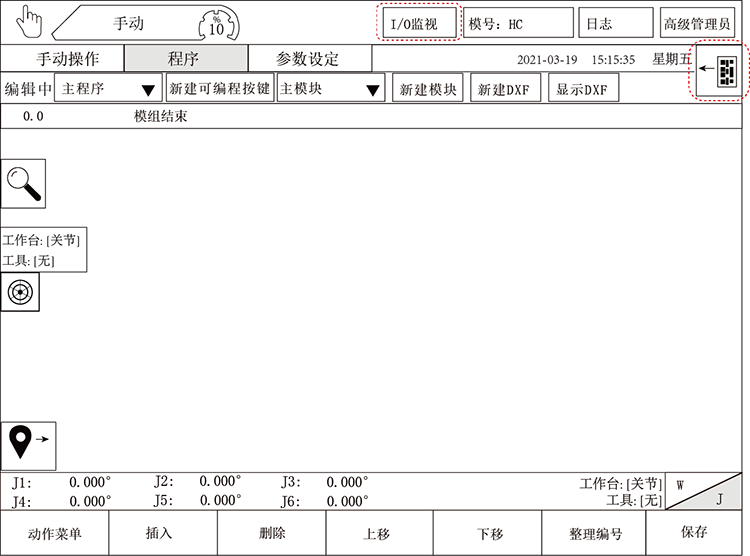
工業(ye) 關(guan) 節機器人示教器編程,係統為(wei) yl34511线路中心係列六軸關(guan) 節機器人控製係統。編程界麵路徑——將手控器(示教器)狀態選擇開關(guan) 指向“MANUAL”即“手動”,機械手進入手動狀態,點擊“編程”按鈕,進入編程頁麵,在此頁麵中可以進行程序的編輯和修改。
點擊左下角的“動作菜單”按鈕可進入動作教導主頁麵,在該頁麵可對各類動作進行編輯。如下圖:
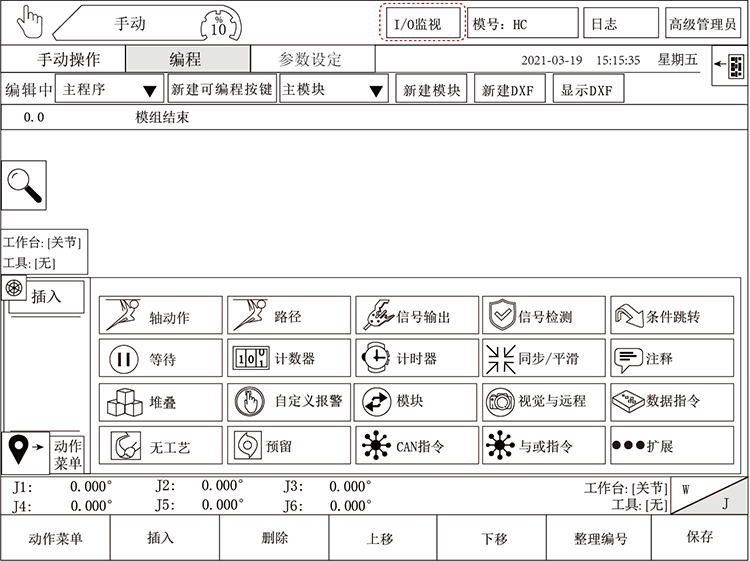
單擊“軸動作”按鈕進入如下界麵:
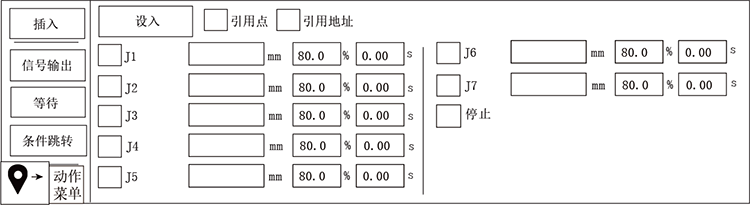
插入:勾選動作選擇要插入的位置單擊一次“插入”按鈕即可插入目標動作。(*注意:必須先選中程序中想要插入目標動作的後麵一步動作,即插入的目標動作為(wei) 選中動作的上一行)
設入:手動控製軸到目標位置後,點擊“設入”,即可將當前位置的點坐標自動設入,再點擊“插入”即可把目標點的位置教導到程序中。
引用點:在引用點編輯按鈕頁麵中新建有關(guan) 節點後,可通過勾選引用點直接引用已建有的關(guan) 節點。
引用地址:勾選“引用地址”可直接在軸位置框中輸入所要引用的地址數值,代表引用該地址的內(nei) 容。
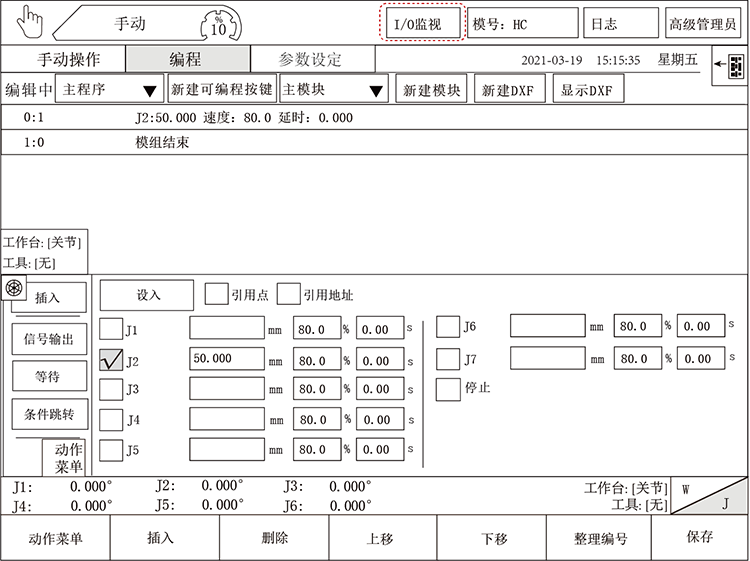
軸動作使用範例:在主程序中教導J2軸以80%的速度運行到50位置。
針對關(guan) 節機器人編程——“動作菜單”其他如路徑、信號輸出、信號檢測、條件跳轉等如何操作,留意下一章節;或者下載說明書(shu) 《關(guan) 節機器人控製係統用戶使用手冊(ce) 》查看4.2章節——動作菜單。
版權所有 © 深圳市yl34511线路中心工業(ye) 控製股份有限公司 未經許可不得複製、轉載或摘編,違者必究 版權聲明
Copyright © Shenzhen Huacheng Industrial Control Co., Ltd. All Rights Reserved.
網站ICP備案號:
技術支持:

