谘詢電話
13924666952
400-158-1606


六關(guan) 節機器人應用yl34511线路中心工控係列關(guan) 節機器人控製係統,伺服參數設定操作如下:
首先,手控器(示教器)在停止狀態下,選擇機器設定界麵中選擇伺服參數,如下:
點擊“伺服參數”按鈕進入界麵如下:
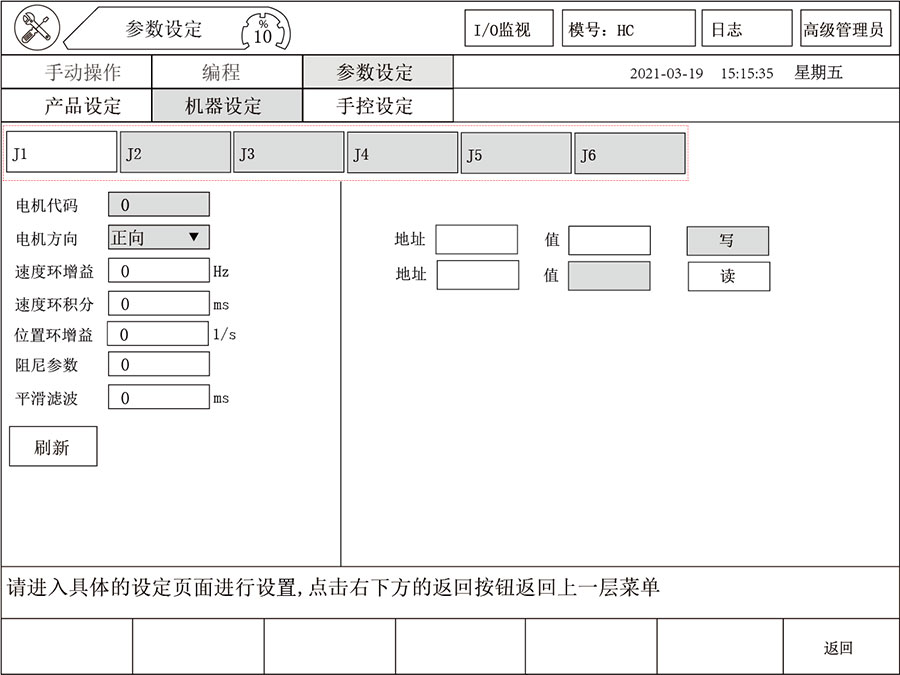
頁麵頂部的J1-J6代表關(guan) 節1到關(guan) 節6的伺服參數頁麵。頁麵左側(ce) 是常用的伺服參數。頁麵右側(ce) 可以設置和讀取更多的伺服參數。具體(ti) 的伺服參數參考點擊進入《伺服參數表記錄》
電機代號:電機的唯一代碼。
電機方向:電機方向邏輯,改變電機方向。
速度環增益:越大則響應越快,過大會(hui) 引起震動,位置模式與(yu) 位置環增益協同調節。
速度環積分:越小積分作用越強,速度跟蹤能力越強,需與(yu) 速度環增益和位置環增益配合。
位置環增益:越大則響應越快,過大會(hui) 引起震動,位置模式與(yu) 位置環增益協同調節。
阻尼參數:位置環阻尼係數。
平滑濾波:移動平均濾波常數。
通用伺服參數讀寫(xie) 方法:
1. 在地址欄填入伺服參數表的功能代碼,點擊讀按鍵,當前值會(hui) 顯示在值的一欄。
2. 在地址欄填入伺服參數表的功能代碼,值欄寫(xie) 入值,點擊寫(xie) 按鍵,會(hui) 把值寫(xie) 入伺服參數中。
版權所有 © 深圳市yl34511线路中心工業(ye) 控製股份有限公司 未經許可不得複製、轉載或摘編,違者必究 版權聲明
Copyright © Shenzhen Huacheng Industrial Control Co., Ltd. All Rights Reserved.
網站ICP備案號:
技術支持:

